Fertigungsmess- und Prüftechnik
-
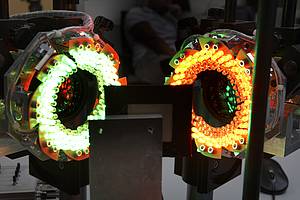
Schnelle Prüfung komplexer Geometrien (SFB 871 C2)Für die Wartung eines Flugtriebwerkes, insbesondere die Inspektion der Turbinenschaufeln einer Blisk, werden die Triebwerke teilzerlegt und mit flexiblen Video-Endoskopen analysiert. Diese subjektive Sichtprüfung erfolgt durch speziell geschulte Mitarbeiter. Um neben der persönlichen Beurteilung durch den Mitarbeiter eine quantitative Analyse einer Blisk zu ermöglichen, wird an einem hochpräzisen Miniatur-3D-Messsystem auf Basis des Streifenprojektionsverfahrens geforscht. Umgesetzt wird dieser Sensor über ein Boroskop, welches mit einer Chip-on-the-Tip Kamera ausgestattet ist. In Kombination mit einer hochgenauen Aktorik und speziell entwickelten Kalibrier- und Stichingverfahren, sollen vollständige und automatisierte 3D-Messungen erfolgen. Mit diesem System soll eine präzise quantitative Qualitätskontrolle ermöglicht werden, um somit die Sicherheit der Triebwerksprüfung zu steigern und effizienter zu gestalten.Leitung: Prof. Dr. Eduard ReithmeierTeam:Jahr: 2011Förderung: DFGLaufzeit: 2011-2022
![]()
![]()
-
Mutliskalige Geometrieerfassung (SFB 871 A2)Das Teilprojekt A2 umfasst die Entwicklung eines robotergeführten Multisensorsystems zur automatisierten 3D Erfassung von komplexen Geometrien. Die Messergebnisse der einzelnen Skalenbereiche werden zur Charakterisierung der Bauteilgeometrie in Hinblick auf Verschleißspuren und Schäden sowie der Bestimmung der Oberflächenbeschaffenheit durch Messung der Oberflächenmikrostrukturen genutzt. Das Messsystem wird im Rahmen der Eingangsbefundung und zwischen bearbeitenden Reparaturmaßnahmen zur Qualitätsbewertung eingesetzt.Leitung: PD Dr.-Ing. Dipl.-Phys. Markus Kästner, Prof. Dr. Eduard ReithmeierTeam:Jahr: 2011Förderung: DFGLaufzeit: 2011-2022
![]()
![]()
-
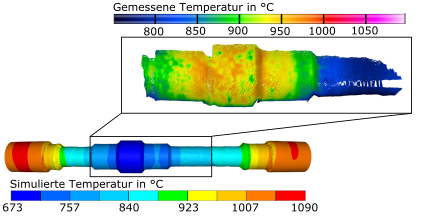
Multiskalige Geometrieprüfung von Fügezonen (SFB 1153 C5)Forschungsschwerpunkt des Teilprojekts C5 ist die flächige 3D-Geometrie-Rekonstruktion schmiedewarmer Tailored-Forming-Bauteile unter Nutzung optischer Triangulationssensoren. Die Prüfung der geometrischen Merkmale der Fügezone nach jedem einzelnen Prozessschritt ermöglicht die Einstellung des Herstellungsprozesses, eine Fehlerfrüherkennung, wie auch die Evaluierung von Bauteilverzügen, die durch inhomogene Abkühlprozesse der hybriden Materialpaarungen entstehen können. Für weitere Informationen: https://www.imr.uni-hannover.de/de/forschung/forschungsprojekte/forschungsprojekte-detailansicht/projects/multiskalige-geometriepruefung-sfb-1153-c5Leitung: PD Dr.-Ing. Dipl.-Phys. Markus Kästner; Dr.-Ing. Lennart HinzTeam:Jahr: 2015Förderung: DFGLaufzeit: 2015-2027
![]()
![]()
-
Robuste Messdatenregistrierung mittels maschinellen LernensBei der Charakterisierung der Mikrostruktur von technischen Komponenten entsteht ein Zielkonflikt. Eine möglichst hohe Auflösung ermöglicht es auch kleine Strukturen zu erfassen, hat aber ein kleines Messfeld zur Folge. Gleichzeitig soll das Messfeld möglichst groß sein um statistisch aussagekräftige Ergebnisse zu erhalten. Eine Lösung hierfür bietet die Registrierung, bei der mehrere hochaufgelöste Aufnahmen zu einem Gesamtbild zusammengesetzt werden. Klassische Verfahren genügen heutigen Ansprüchen oft nicht mehr. Das maschinelle Lernen bietet hier einen vielversprechenden Ansatz um genauere und robustere Ergebnisse zu erreichen. Im Rahmen dieses Projektes sollen diese Methoden zur Registrierung von mikroskopischen Oberflächenmessdaten entwickelt und erforscht werden.Leitung: Prof. Dr. Eduard ReithmeierTeam:Jahr: 2019Laufzeit: 01.02.2019-31.01.2024
![]()
![]()
-
Inline-fähiges Geometriemesssystem (Digit_Rubber)Das Ziel dieses Teilvorhabens besteht in dem Aufbau und der Weiterentwicklung eines angepassten Messsystems zur Erfassung der 3D-Geometrie im Prozess der Kautschukextrusion. Die Messdaten werden auf verschiedene Kenngrößen untersucht und den datenverarbeitenden Kooperationsteilvorhaben zur Verfügung gestellt. Die Motivation besteht über die Bestimmung des Abkühl- und Strangaufweitungsverhaltens in der materialspezifischen Charakterisierung des Kautschuks. Die aufgenommenen Daten bilden damit einen digitalen Baustein für ein tiefergehendes Verständnis des Materials ‚Kautschuk‘ sowie für eine mögliche Prozessregelung, z. B. zur Ausschussreduktion beim Einfahren.Leitung: PD Dr.-Ing. Dipl.-Phys. Markus KästnerTeam:Jahr: 2021Förderung: Bundesministerium für Bildung und ForschungLaufzeit: 01.05.2021-21.05.2024
![]()
![]()
-
Roboterassistierte EndoskopieBei der Wartung von Flugzeugtriebwerken ist es notwendig neben den Rotorstufen, auch die feststehenden Schaufeln der Statorstufen innerhalb des Triebwerks zu begutachten. Hierfür wird aktuell ein flexibles Videoendoskop verwendet, dass durch eine kleine Öffnung an der Turbinenseite in den jeweiligen Gaskanal eingeführt wird. Um neben der persönlichen Beurteilung durch den Mitarbeitenden eine quantitative Analyse von Schadensgeometrien zu ermöglichen, wird an einem flexiblen Miniatur-3D-Messsystem auf Basis des Streifenprojektionsverfahrens geforscht. Das Projekt wird in Zusammenarbeit mit dem Institut für Mechatronische Systeme bearbeitet. Die Entwicklung eines robotischens Trägersystems auf der Basis eines Kontinuumsroboters wird hierbei vom IMES übernommen.Leitung: PD Dr.-Ing. Dipl.-Phys. Markus KästnerTeam:Jahr: 2023Laufzeit: 2023 - 2026
![]()
![]()
-
Referenced Large-Scale Airborne Measurement System - RAMS - SPP2433Dieses Projekt, welches im Rahmen des Schwerpunktprogramms "Fliegende Messtechnik" SPP2433 bearbeitet wird, befasst sich mit der Messung großvolumiger Bauteile. Ziel ist es, einen 3D-Oberflächensensor, mithilfe eines UAV, entlang der Oberfläche eines großvolumigen Objektes zu vermessen und 3D Daten in hoher Auflösung und Genauigkeit zu erhalten. Das Objekt wird mit mehreren Einzelmessungen aufgenommen, somit ist es möglich, bei Bedarf, das gesamte Objekt hochgenau zu erfassen. Die einzelnen Posen des Sensors werden durch ein am Boden befindliches Laser-Messsystem erfasst. Die Pose dient zur Referenzierung der Einzelmessungen. Das Messvolumen des Laser-Messsystems wird mithilfe autonomer Roboter erweitert, indem einzelne Messstationen weiter bewegt werden.Leitung: PD Dr.-Ing. Dipl.-Phys. Markus KästnerTeam:Jahr: 2024Förderung: DFGLaufzeit: Nov. 2024 - Nov. 2027
![]()
![]()













Industrielle und Medizinische Bildverarbeitung
-
Modellbasierte automatisierte Justage komplexer optischer SystemeDie Anwendung optischer Systeme nimmt sowohl in der Industrie, als auch bei privaten Anwendern stetig zu. Somit werden beispielsweise Interferometer im Bereich der Messtechnik, Laser in der Gravitationsphysik, Teleskope in der Astronomie und Kameraobjektive für bildgebende Verfahren verwendet. Durch diesen wachsenden Bedarf steigen auch der Anspruch und die Komplexität solcher Systeme. Besonders der Montageprozess miniaturisierter und komplexer optischer Systeme wird heutzutage noch überwiegend noch manuell durchgeführt und hängt somit maßgeblich von der Expertise des geschulten Personals ab.Leitung: M.Sc. Nils MelchertJahr: 2020Laufzeit: 01.04.2020 - 01.04.2023
![]()
![]()
-
‚In situ‘-Bildverarbeitungsprüfung von thermischen Beschichtungen in Flugtriebwerken (NBank, TinTin)Das vorliegende Teilprojekt findet innerhalb der „Technologieinitiative Triebwerksinstandsetzung“ (TinTin) statt, welche ein Verbundprojekt zwischen der MTU Maintenance GmbH, der TU Braunschweig und der Leibniz Universität Hannover darstellt. Der Forschungsschwerpunkt liegt hierbei in der Entwicklung von innovativen Wartungstechnologien für Flugzeugtriebwerke. Innerhalb des Teilprojekts sollen mithilfe von Bildverarbeitungsalgorithmen Inspektionsprozesse teilautomatisiert und somit effizienter und flexibler gestaltet werden. Dabei ist vor allem eine Quantifizierung von Schadenserscheinungen interessant, da mithilfe vergleichbarer Schadensmaße reparaturfähige Triebwerkskomponenten identifiziert und gesichert werden können.Leitung: Prof. Dr. Eduard ReithmeierTeam:Jahr: 2021Förderung: NBankLaufzeit: 01.01.2021 - 31.12.2023
![]()
![]()
-
Smart-OP durch KI-basierte AssistenzsystemeIm Rahmen des Forschungsvorhabens soll ein digitaler OP-Assistent entwickelt werden, welcher es ermöglicht durch Instrumentenüberwachung das im OP befindlichen Personal zu entlasten und darüber hinaus Daten für die Planung effizienterer und hygienisch optimierter OPs zu akquirieren. Zentral für die Entwicklung des OP-Assistenten wird eine mehrskalige KI-basierte Bildverarbeitung zur Objekterkennung und Koordinatenregression sein, welche es ermöglicht mit kosteneffektiven und leicht installierbaren Kameras relevante Objekte im Raum zu verfolgen und auch bei Verdeckungen robuste Ergebnisse zu liefern. Zentrale Forschungsfragen umfassen hierbei insbesondere die Netzkonditionierung mit synthetischen Daten auf Basis detailgetreuer virtueller 3D Umgebungen sowie die Entwicklung von Netzarchitekturen bei Kombination mit Zustandsschätzverfahren. Der Erkennungsalgorithmus wird genutzt um alle im Eingriff befindlichen Instrumente zu überwachen und dokumentiert jedes individuelle Werkzeug hinsichtlich Benutzungsdauer, Einsatzart, Benutzer und Bewegungsprofil. All diese Informationen ermöglichen die Erstellung von belastbaren Statistiken und die automatisierte Anfertigung eines OP-Berichts, eine intelligente OP-Planung oder die Konzeptionierung von Greifersystemen für automatisierte Instrumentenanreichungen. Gefördert wird das Projekt durch die Förderline Young Investigator Grands der Leibniz Universität Hannover.Leitung: Dr. Ing. Lennart HinzTeam:Jahr: 2024Förderung: Young Investigator Grands LUHLaufzeit: 01.01.2024 - 31.12.2025
![]()
![]()






Akustik
-
Light weight IN-ear COmmunication headset with Active noise ReductionDas Forschungsprojekt LINCOAR (Light weight IN-ear COmmunication headset with Active noise Reduction) ist ein Auftragsforschungsprojekt der Firma Sennheiser electronic GmbH Co. KG, das durch den Europäischen Fonds für regionale Entwicklung und das Land Niedersachsen finanziell unterstützt wird. Es konzentriert sich auf die Entwicklung von In-Ohr-Kopfhörern mit aktiver Geräuschunterdrückung (ANC). An unserem Institut liegt der Forschungsschwerpunkt auf dem Regelungsentwurf mit adaptiven Algorithmen. Das Projekt gliedert sich in zwei Teilprojekte, die adaptive Feedforward-Regelung und die adaptive Feedback-Regelung. Im ersten Projekt wird ein adaptiver Feedback-Regler für die aktive Geräuschkontrolle bei In-Ear-Kopfhörern vorgeschlagen. Das Hauptproblem bei In-Ear-Kopfhörern besteht darin, dass der Sekundärweg von Person zu Person unterschiedlich ist. Basierend auf einer Identifikation des inversen Minimalphasenanteils der Strecke wird die Stabilität des Regelkreises verbessert und damit eine bessere Dämpfung ermöglicht. Die Effektivität dieses aktiven adaptiven Systems wird Simulationen und auch experimentelle Ergebnisse bestätigt Im zweiten Projekt einige Verbesserungen in Verbindung mit der adaptiven Feedforward-Regelung vorgestellt. Insbesondere wird der Nutzen von virtuellen Sensoren untersucht. Die Remote-Mikrofontechnik wird eingesetzt, um die Dämpfung am Trommelfell deutlich zu verbessern.Leitung: Dr. Ing. Christian PapeJahr: 2012
![]()
![]()
-
Positionsadaptive Ruhezone in geschlossenen RäumenIn der Umgebung großer Transformatoren oder rotierender Maschinen wie Flugzeugtriebwerken sind Menschen einem hohen und vor allem kontinuierlichen Lärmpegel ausgesetzt. Der emittierte – primär tieffrequente – Schall kann dabei durch das Tragen des üblichen passiven Gehörschutzes nur unzureichend gedämpft werden. In Flugzeugcockpits beispielsweise finden daher bereits aktiv wirkende Maßnahmen Anwendung, die den Triebwerkslärm an den Pilotenplätzen mittels sogenanntem Gegenschall reduzieren. Verfügbare aktive Lösungen sind jedoch entweder an feste Positionen gebunden oder machen das Mitführen entsprechender tragbarer Geräte (z.B. Kopfhörer) nötig. Im Rahmen des aktuellen Projekts wird dazu eine Feedforward-Steuerung entworfen, die mittels Gegenschall eine lokale Ruhezone automatisch an der gewünschten Position erzeugt. Hierfür wird die Methode des virtuellen Mikrofons angewandt und dessen Wirkposition adaptiv mittels Kamera-Tracking verschoben. Dabei ist die erreichbare Lärmreduktion am Ort der Ruhezone vor allem von der parametrischen Modellierung der Schalllaufwege (der Regelstrecken) abhängig, welche lokal stark variieren. Dies wird primär durch die Anwendung im geschlossenen Raum verursacht, dessen von Reflexionen geprägte Akustik sich im Frequenzgang der Strecken widerspiegelt und die Identifikation der Strecken zu einer besonderen Herausforderung macht.Leitung: Dr. Ing. Christian PapeTeam:Jahr: 2020
![]()
![]()




Regelungstechnik
-
Makro-Mikro-Kinematik zur MikromontageDer Schwerpunkt des Forschungsvorhabens liegt in der Erforschung von Methoden zum Aufbau eines Handhabungssystems, welches die aktorische Grundlage für ein klinikgerechtes, ultragenaues mechatronisches Assistenzssystem bilden soll. Ziel ist es dabei, eine Auflösung von 1 µm in einem Arbeitsvolumen von 10 mm³ zu erreichen, wobei das Arbeitsvolumen flexibel im Raum positioniert werden kann. Die technische Umsetzung erfolgt durch die Kopplung einer Piezoaktorik an einen 6-Achs-Präzisionsroboter (µKRoS316). Der Roboter übernimmt die Positionierung der Werkzeuge im gesamten Arbeitsbereich (Makro-Positionierung). Der Mikro-Positioniereinheit kommen Aufgaben wie Kompensation der Lage-Ungenauigkeiten des Roboters, Ausgleichen von Schwingungen und das hochgenaue Verfahren des Werkzeugs zu. Das Arbeitsprogramm lässt sich entsprechend der oben genannten Arbeitsschwerpunkte in fünf Bereiche gliedern: Entwurf einer gekoppelten Regelung Aufbau eines externes Messsystems zur Realtime-6D-Lagebestimmung Erforschung von Methoden zur Verbesserung der 6D-Lagegenauigkeit von Positioniereinheiten Matching der Koordinatensystemen von Positioniereinheiten und des Messsystems und Bahnplanung Entwicklung und Konstruktion des WerkzeugsatzesJahr: 2015
![]()
![]()
-
Regelungskonzepte bildverarbeitungsgestützter Bewegung eines ObjektesAm Institut für Mess- und Regelungstechnik wurde ein Versuchstand zur Stabilisierung eines 3D-inversen Pendels gebaut. Für die Bestimmung der Position des Pendels ist es notwendig die Positionen des Fußpunktes und der Spitze des Pendels zu ermitteln. Die Position der Spitze des Pendels – genau gesagt der weißer Kugel – wird mit Hilfe der Hochgeschwindigkeitskamera ermittelt. Die CMOS-Kamera macht 148 Bilder pro Sekunde. Der Zusammenhang zwischen den 2D-Bildkoordinaten und den 3D-Weltkoordinaten wird durch eine vorherige Kamerakalibrierung hergestellt. Die Position des Fußpunktes bzw. des Wagens wird über die Schrittmotoren ermittelt. Ziel der Regelung ist es, das Pendel in der stabilen aufrechten Lage an einer Position zu halten, im zweiten Schritt soll sich das Pendel auf eine Bahn – im Speziellen auf einem Kreis - stabil bewegen. Es werden ein PID-Regler, ein Regler mit Zustandsrückführung, ein MRAC- Regler (model reference adaptive control) mit Vollzustandrückführung und ein nichtlinearer Regler verwendet. Technisch wird die Steuerung mit Hilfe der xPC-Target Toolboxes von MATLAB realisiert. Die Regelungsalgorithmen werden vom Target-PC ausgeführt. Auf dem Host-PC wird lediglich die Bildverarbeitung ausgeführt und die Ergebnisse werden zum Target-PC durch die Ethernet-Verbindung geschickt. Diese Regelungskonzepte könnten für die Stabilisierung der Patienten in der Strahlentherapie verwendet werden.Jahr: 2015
![]()
![]()
-
Bildrückgeführte Regelung eines optomechanischen Derotators zur Messung an rotierenden BauteilenRotierende Bauteile sind in einer Vielzahl von Maschinen verbaut. Um einen effizienten und sicheren Betrieb zu gewährleisten ist eine Überprüfung dieser unerlässlich. Dieses lässt sich am zuverlässigsten durch Messungen erreichen, insbesondere wenn diese berührungslos und während des eigentlichen Betriebs durchgeführt werden. So kann sichergestellt werden, dass die Ergebnisse nicht durch das Messsystem verfälscht werden.Leitung: Dr. Ing. Christian PapeTeam:Jahr: 2017
![]()
![]()
-
Simultan-Lokalisation und Kartierung System unter Verwendung von LuftkameraGerade in den Bereichen der Roboternavigation, der Lokalisation und Kartierung, sowie im Augmented oder Virtual Reality hat in den letzten Jahren die Nachfrage nach Echtzeit-3D-Rekonstruktionsmethoden stark zugenommen. Ein vielversprechender Ansatz zur Implementierung von 3D-Rekonstruktionsmethoden ist das Prinzip des Simltaneous Localization and Mapping, kurz SLAM genannt. Das Ziel dieser Methode ist einerseits die 3D-Rekonstruktion der Umgebung und anderseits die zu ihr relative Lokalisierung und Verfolgung bewegender Objekte.Leitung: M.Eng. Hang LuoJahr: 2018Laufzeit: 01.01.2018 – 31.12.2020
![]()
![]()
-
Robotergestützte Montage optischer Systeme mittels Prädiktor-Korrektor-VerfahrenDieses Forschungsprojekt beschäftigt sich mit dem funktionsorientierten Aufbau optischer Systeme und zielt darauf ab, die hohen geforderten Toleranzen sowohl der optischen Komponenten als auch der Positioniersysteme zu verringern. Des Weiteren soll auch eine geringere Ausschussrate optischer Komponenten während des Herstellungsprozesses gewährleistet werden.Leitung: Dr.-Ing Christian PapeJahr: 2018
![]()
![]()